Data Collection
Overview
The data_collection/ package runs a synchronous CARLA session that spawns an ego vehicle, configurable traffic, and a sensor rig, and then records multi-modal data to disk.
The package has been tested on Windows 11, CARLA 0.10.0, Unreal Engine 5.
Prerequisites
CARLA UE5 server: Please follow the official instructions to build and run the server.
Python 3.8 for CARLA environment.
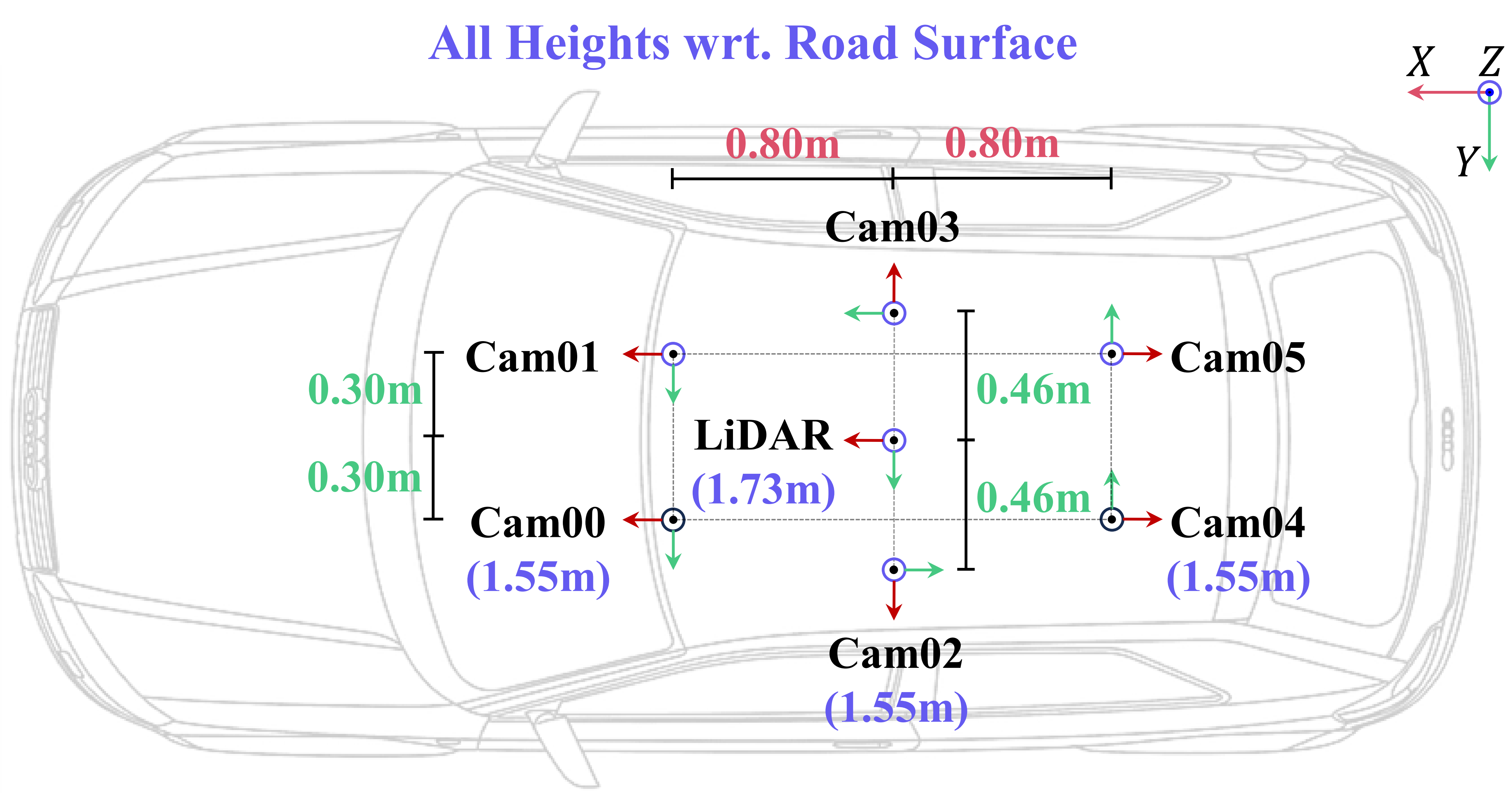
Sensor configuration
The setup of cameras cam00 – cam03 follows a KITTI-360-style rig. To facilitate surround-view perception research, we additionally provide two rear-view cameras: cam04 and cam05, which are mirror-symmetric to cam00 and cam01 around the LiDAR.
Each camera collects rgb, semantic, and depth images with a resolution of 376x1408 pixels.
LiDAR and semantic LiDAR data are collected with a 32-channel sensor, a range of 120 meters, spinning at 10 Hz and producing 250,000 points per second.
A detailed figure of the sensor configuration is shown below:
Running
Use the following command to launch the data collection session:
cd data_collection/
python main.py
Hydra loads config/config.yaml by default. Override on the command line as needed, for example:
python main.py data_collection.frames=100
Output Data Format
The collected data is saved in the following directory structure:
CarlaOccV1
└── <TownXX_Opt>_Seq<YY>/
├── rgb/
│ ├── image_00/ # Cam00 RGB images
│ ├── image_01/ # Cam01 RGB images
│ ├── ...
│ └── image_bev/ # BEV RGB images
├── semantics_carla/
│ ├── image_00/ # Cam00 semantic images in CityScapes palette
│ ├── ...
├── depth_carla/
│ ├── image_00/ # Cam00 depth maps
│ ├── ...
├── lidar/
│ └── *.ply # LiDAR point clouds (x, y, z, intensity)
├── semantic_lidar/
│ └── *.ply # Semantic LiDAR (x, y, z, CosAngle, ObjIdx, ObjTag)
├── traffic_info/
│ └── *.yaml # Traffic participant information per frame
└── poses/
├── cam_00.txt # Cam00 poses
└── lidar.txt # LiDAR poses